




Self-Driven “Vine” Seeks Light and Heat
This article is part of our exclusive IEEE Journal Watch series in partnership with IEEE Xplore.
Thanks to eons of evolution, vines have the ability to seek out light sources, growing in the direction that will optimize their chances of absorbing sunlight and thriving. Now, researchers have succeeded in creating a vine-inspired crawling bot that can achieve similar feats, seeking out and moving towards light and heat sources. It’s described in a study published last month in IEEE Robotics and Automation Letters.
Shivani Deglurkar, a Ph.D. candidate in the department of Mechanical and Aerospace Engineering at the University of California, San Diego, helped co-design these automated “vines.” Because of its light- and heat-seeking abilities, the system doesn’t require a complex centralized controller. Instead, the “vines” automatically move towards a desired target. “[Also], if some of the vines or roots are damaged or removed, the others remain fully functional,” she notes.
While the tech is still in its infancy, Deglurkar says she envisions it helping in different applications related to solar tracking, or perhaps even in detecting and fighting smoldering fires.
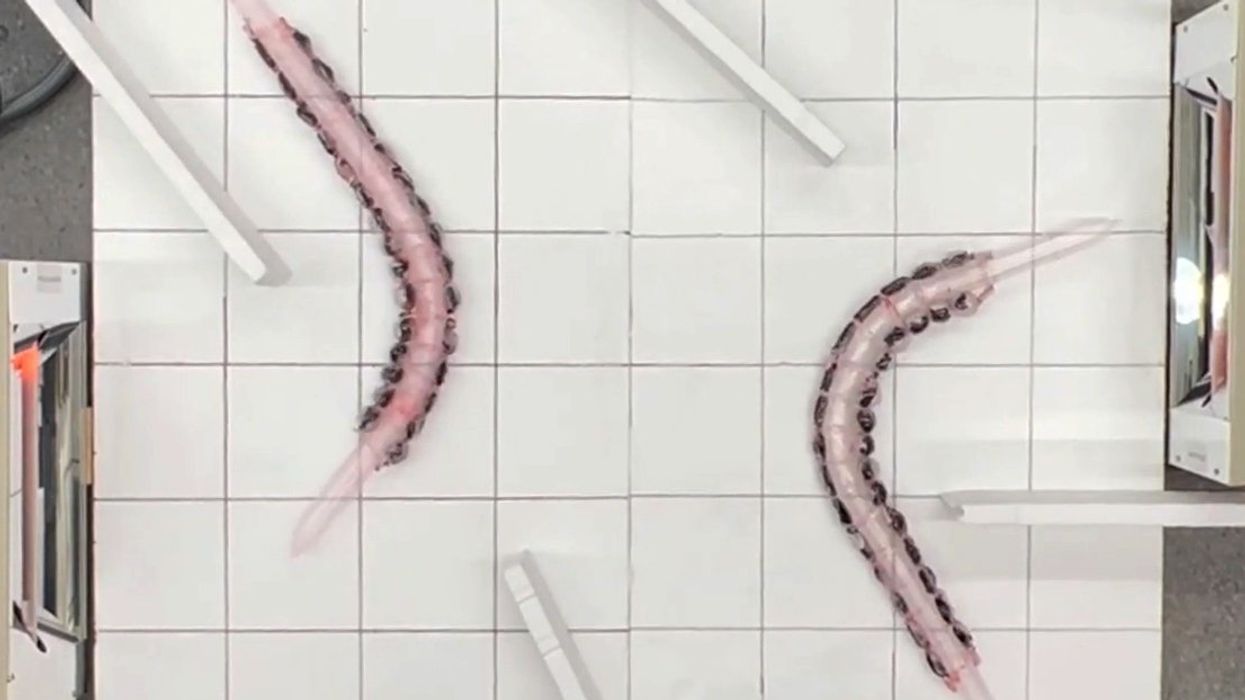
It uses a novel actuator that contracts in the presence of light, causing it to gravitate towards the source.
Shivani Deglurkar et al.
To help the device automatically gravitate towards heat and light, Deglurkar’s team developed a novel actuator. It uses a photo absorber in low-boiling-point fluid, which is contained in many small, individual pouches along the sides of the vine’s body. They called this novel actuator a Photothermal Phase-change Series Actuator (PPSA).
When exposed to light, the PPSAs absorb light, heat up, inflate with vapor, and contract. As the PPSAs are pressurized, they elongate, by unfurling material from inside its tip. “At the same time, the PPSAs on the side exposed to light contract, shortening that portion of the robot, and steering it toward the [light or heat] source,” explains Deglurkar.
Her team then tested the system, placing it at different distances from an infrared light source, and confirmed that it will gravitate towards the source at short distances. Its ability to do so depends on the light intensity, whereby stronger light sources allow the device to bend more towards the heat source.
Full turning of the vine by the PPSAs takes about 90 seconds. Strikingly, the device was even able to navigate around obstacles thanks to its inherent need to seek out light and heat sources.
Charles Xiao, a Ph. D. candidate in the department of Mechanical Engineering at the University of California, Santa Barbara, helped co-design the vine. He says he was surprised to see its responsiveness in even very low lighting. “Sunlight is about 1000 W/m2, and our robot has been shown to work at a fraction of solar intensity,” he explains, noting that a lot of comparable systems require illumination greater than that of one Sun.
Xiao says that the main strength of the automated vine is its simplicity and low cost to make. But more work is needed before it can hit the market—or makes its debut fighting fires. “It is slow to respond to light and heat signals and not yet designed for high temperature applications,” explains Xiao.
Therefore future prototypes would need better performance at high temperatures and ability to sense fires in order to be deployed in a real-world environment. Moving forward, Deglurkar says her team’s next steps include designing the actuators to be more selective to the wavelengths emitted by a fire, and developing actuators with a faster response time.